
中大、自働化の応用を無限なる可能性を実現する! 詳細 +
-
-
-
製品
詳細
ロボットモデル ZDFT1215 自由 6 位置 地上設置および吊り下げ
天井設置最大動作速度 J1軸 200°/秒 J2軸 185°/秒 J3軸 155°/秒 J4軸 265°/秒 J5軸 215°/秒 J6軸 260°/秒 最大動作範囲 J1軸 ±180° J2軸 -125°~+90° J3軸 -84°~+205° J4軸 ±170° J5軸 -150°~+116° J6軸 ±360° 最大活動半径 1463mm 最大端荷重 12Kg 本体重量 約116Kg 許容トルク J4 22N·m J5 22N·m J6 9.8N·m 許容慣性モーメント J4 0.65kgm² J5 0.65kg-m² J6 0.17kg-m² 繰り返し精度 ±0.05mm ロボットベースサイズ 290×300mm 周囲温度 0~45℃ 相対湿度 20~80%RH 大気圧 89KPa~106KPa(標高1000m以下) 振動、衝撃、衝突 ≤0.5G 保護等級 P54(手首IP65) ■ 作業範囲図
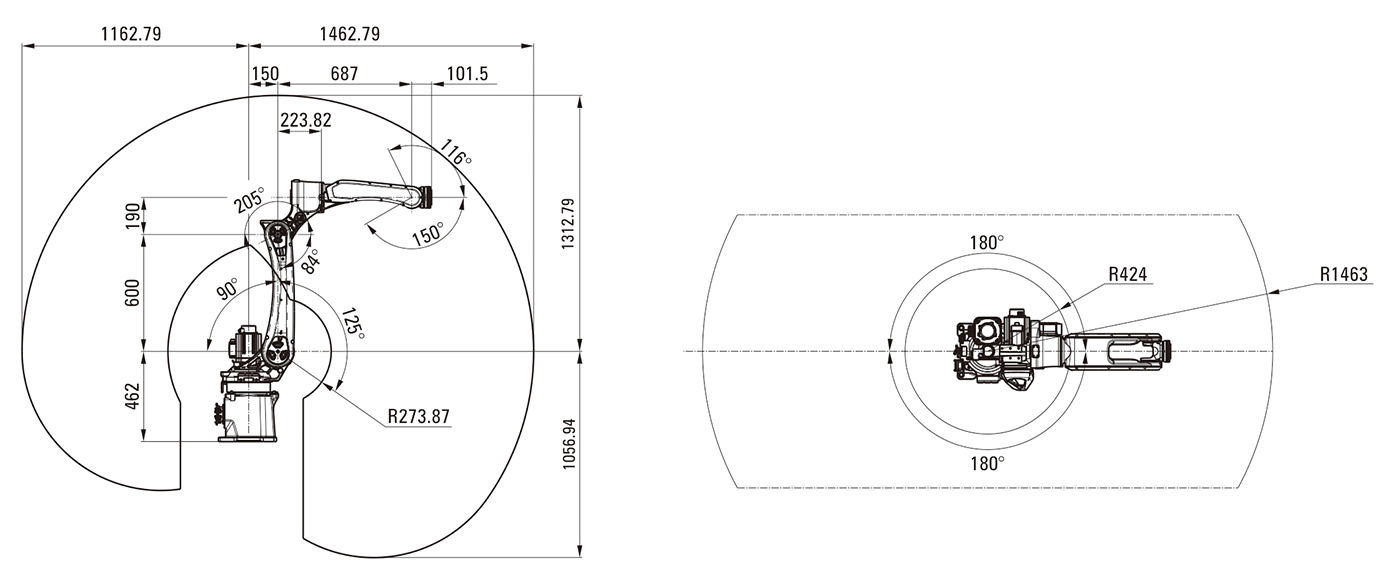
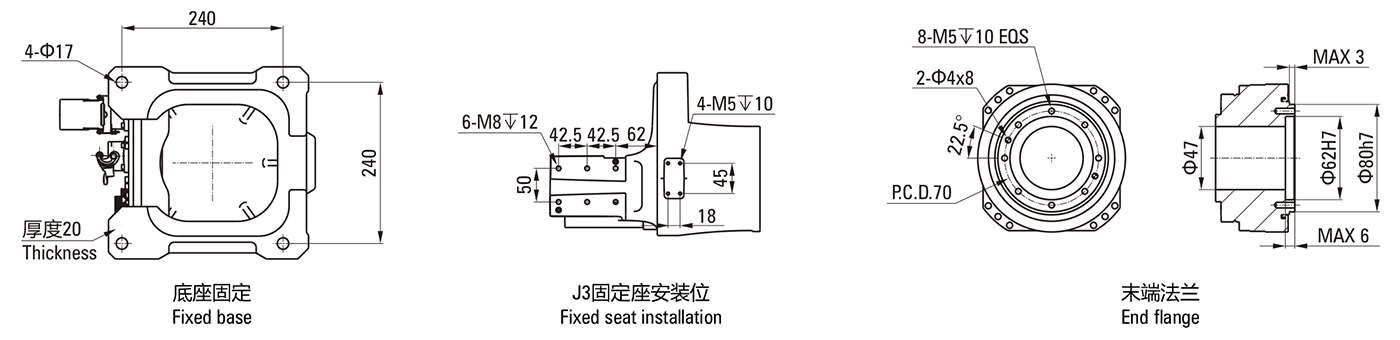
■ 設置インターフェース図
■ 質量中心に対する接続棒の慣性テンソル
オブジェクト ベース 回転座
コンポーネントブームコンポーネント 小腕固定座
コンポーネント小腕
コンポーネント手首 相談 座標系0 座標系1 座標系2 座標系3 座標系4 座標系5 lxx(Kgmm²) / 1.0×10⁶ 1.4×10⁵ 1.2×10⁵ 2.1×10⁶ 2.0×10⁴ lyy(Kgmm²) / 1.3×10⁶ 9.7×10⁵ 1.6×10⁵ 2.1×10⁶ 1.0×10⁴ lz(Kgmm²) / 9.5×10⁵ 8.6×10⁵ 1.8×10⁵ 4.0×10⁴ 1.7×10⁴ ■ ジョイントカップリング
ジョイント J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 カップリング関係式
(カップリング係数)/ / / / / 35 ■ 減速機パラメータ
モデル 50C 42D 25D 32次ハーモニック 20次ハーモニック FBS32 減速機減速比 32.54 105 126 50 80 30 総合減速比 97.62 105 126 102 128 105 定格出力速度(r/min) 15 15 15 25 25 25 定格トルク(N·m) 490 412 245 76 25 25 始動および停止のための許容トルク(N·m)
(N·m)1225 1029 612 216 56 56 瞬時最大トルク(N·m) 2450 2058 1225 382 98 98 モーメント剛性(N·m) 1764 1660 784 / / / 瞬時最大トルク(N·m) 3528 3320 1568 / / / ■ モーターパラメータ
ジョイント J1 J2 J3 J4 J5 J6 モーターモデル 130 130 80 60 50 50 定格出力 (kW) 2 2 0.75 0.4 0.2 0.2 定格電圧 (V) 220 定格電流 (A) 10 10 5 2.6 1.5 1.5 定格トルク(N·m) 6.36 6.36 2.38 1.27 0.63 0.63 定格速度 (r/min) 3000 3000 3000 3000 3000 3000 最大速度 (/min) 3200 3200 3200 4500 4500 4500 ローター慣性 (*10e-4kgm²) 16.5 16.5 1.2 0.4 0.2 0.2 ラインバック (V/Krpm)
起電力係数50.5 50.5 36.2 33 30 30 極対数 5 エンコーダ 17ビットマルチターン絶縁値玉川協定 関連製品
メッセージ
質問があれば、私達にメッセージを残すことができます。私たちはあなたに返信する専門家を持っています。正しい連絡先情報を入力してください!
寧波中大力徳知能伝動株式有限公司
住所:寧波慈溪高新技術産業開発区新興一路185号
本社電話:+86-4009-002896
北方サービスセンター電話:+86-022-58786102/04
華南サービスセンター電話:+86-769-23606081/82
-






