
中大、自働化の応用を無限なる可能性を実現する! 詳細 +
-
-
-
製品
詳細
ロボットモード ZDGT5023 自由 6 位置 地面設置および吊り下げ
天井設置最大動作速度 J1軸 125°/秒 J2軸 110°/秒 J3軸 145°/秒 J4軸 276°/秒 J5軸 259°/秒 J6軸 274°/秒 最大動作範囲 J1軸 ±180° J2軸 -135°~+100° J3軸 -80°~+180° J4軸 ±180° J5軸 ±115° J6軸 ±360° 最大活動半径 2340mm 最大端部荷重 50Kg 本体重量 約530Kg 許容トルク J4 206N·m J5 206N·m J6 127N·m 許容慣性モーメント J4 28kg-m² J5 28kg·m² J6 11kg·m² 再現性 ±0.08mm ロボットベースサイズ 420×620mm 周囲温度 0~45℃ 相対湿度 20~80%RH 大気圧 89KPa~106KPa(標高1000m以下) 振動、衝撃、衝突 ≤0.5G 保護等級 P54(手首IP67) ■ 作業範囲図
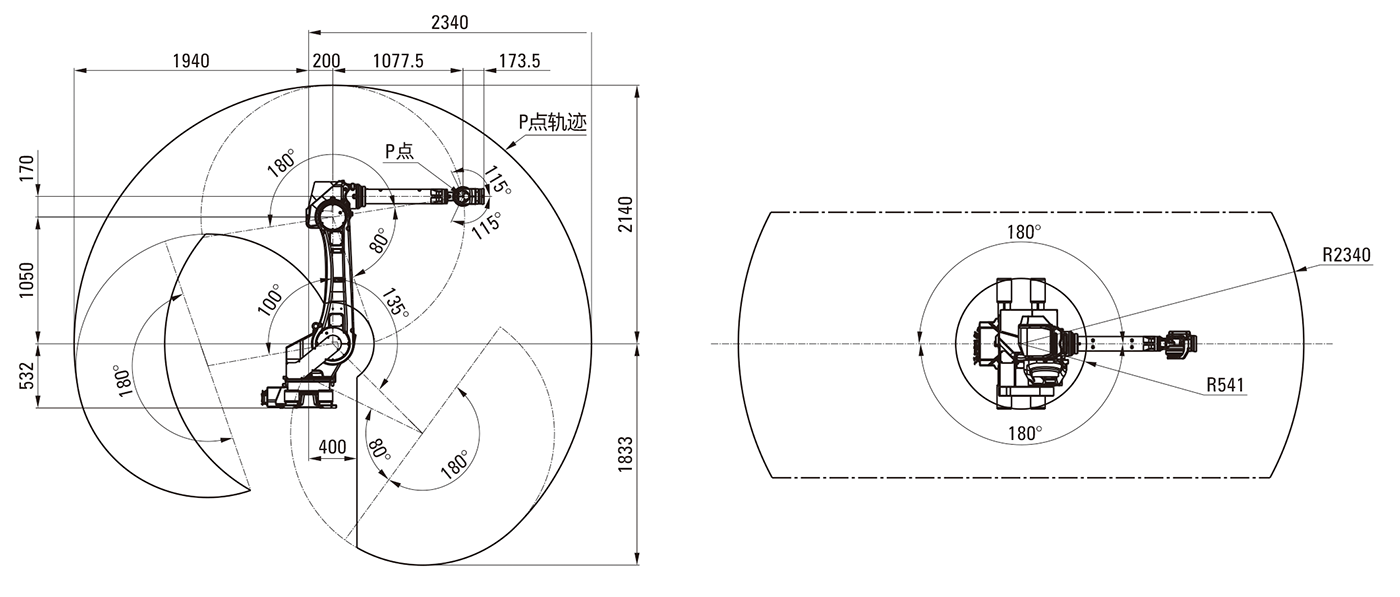
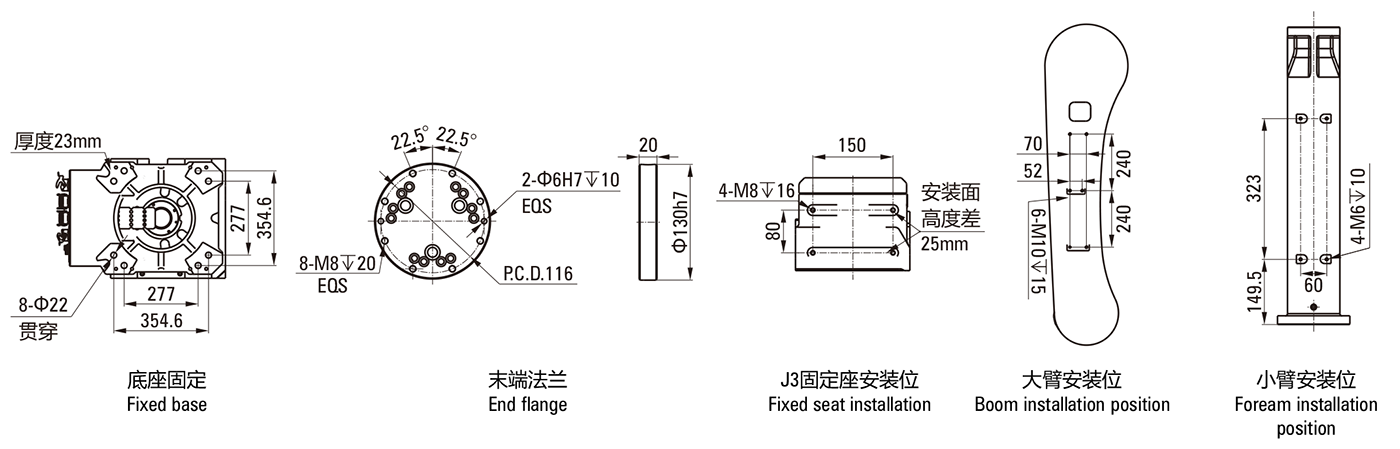
■ 設置インターフェース図
■ 質量中心に対する連結棒の慣性テンソル
オブジェクト ベース コンポーネント ブームコンポーネント 小腕固定座
コンポーネント小腕
コンポーネント手首 相談 座標系0 座標系1 座標系2 座標系3 座標系4 座標系5 lxx(Kgmm²) / 7.0×10⁶ 6.0×10⁶ 1.2×10⁶ 4.8×10⁶ 1.2×10⁵ lyy(Kgmm²) / 8.6×10⁶ 6.2×10⁷ 1.9×10⁶ 4.8×10⁶ 3.9×10⁴ lzz(Kgmm²) / 7.4×10⁶ 5.8×10' 2.4×10⁶ 7.3×10⁴ 9.5×10⁴ ■ ジョイントカップリング
ジョイント J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 カップリング関係式
(カップリング係数)/ / / 41 41 41 ■ 減速機パラメータ
モデル 200C 380D 120C 80D 42D 35BX 減速機減速比 34.86 47.03 36.75 33 41 41 総合減速比 142.02 162 121.06 86.88 92.7 87.35 定格出力速度(r/min) 15 15 15 15 15 15 定格トルク(N·m) 1961 3724 1176 784 412 217 始動および停止のための許容トルク(N·m)
瞬時最大トルク(N·m)4900 9310 2450 1960 1029 533 モーメント剛性(N·m) 9800 18620 4900 3920 2058 1083 ■ モーターパラメータ 8820 7050 2450 2150 1660 822 モーメント剛性(N·m) 17640 14100 4900 4300 3220 1764 モーター型式
ジョイント J1 J2 J3 J4 J5 J6 定格出力(kW) 180 180 130 100 100 100 定格電圧(V) 4.6 4.6 1.8 1 1 1 Rated voltage (V) 380 定格電流 (A) 18 18 6.9 3.7 3.7 3.7 定格トルク (N·m) 29.2 29.2 11.5 3.18 3.18 3.18 定格速度 (r/min) 1500 1500 1500 3000 3000 3000 最大速度 (r/min) 3000 3000 3000 4000 4000 4000 ローター慣性 (*10e-4kgm²) 60 60 18 4.3 4.3 4.3 ラインバック
起電力係数 (V/Krpm)111 111 110 62 62 62 極対数 5 エンコーダ 17ビットマルチターン絶縁値タマガワ合意 関連製品
メッセージ
質問があれば、私達にメッセージを残すことができます。私たちはあなたに返信する専門家を持っています。正しい連絡先情報を入力してください!
寧波中大力徳知能伝動株式有限公司
住所:寧波慈溪高新技術産業開発区新興一路185号
本社電話:+86-4009-002896
北方サービスセンター電話:+86-022-58786102/04
華南サービスセンター電話:+86-769-23606081/82
-






