
中大、自働化の応用を無限なる可能性を実現する! 詳細 +
-
-
-
製品
詳細
ロボットモデル ZDGT1020 自由 6 位置 地上設置および吊り下げ
天井設置J1軸 145°/秒 最大動作速度 J2軸 115°/秒 J3軸 150°/秒 J4軸 290°/秒 J5軸 310°/秒 J6軸 310°/秒 最大動作範囲 J1軸 ±180° J2軸 -125°~+90° J3軸 -86°~+202° J4軸 ±170° J5軸 ±115° J6軸 ±360° 最大活動半径 2029mm 最大端部荷重 10Kg 本体重量 約195Kg 許容トルク J4 26N·m J5 26N-m J6 11N·m 許容慣性モーメント J4 0.90kg-m² J5 0.90kg-m² J6 0.30kg-m² 繰り返し精度 ±0.08mm ロボットベースサイズ 300×420mm 周囲温度 0~45℃ 相対湿度 20~80%RH 大気圧 (高度1000m以下)89KPa~106KPa 振動、衝撃、衝突 <=0.5G 保護等級 (手首IP65)IP54 [作業範囲図]

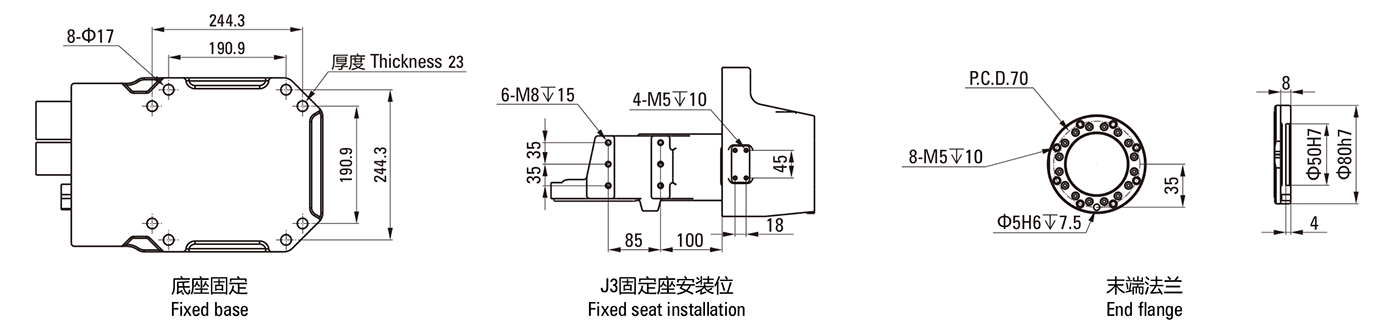
[設置インターフェース図]
[質量中心に対する連結棒の慣性テンソル]
[オブジェクト] [ベース] [回転座席]
[コンポーネント][ブームコンポーネント] [小アーム固定座]
[コンポーネント][小アーム]
[コンポーネント][手首] [相談] [座標系0] [座標系1] [座標系2] [座標系3] [座標系4] [座標系5] lxx(Kgmm²) / 2.1×10⁶ 9.4×10⁵ 1.0×10⁶ 2.1×10⁶ 1.3×10⁴ lyy(Kgmm²) / 2.7×10⁶ 1.2×10⁷ 5.6×10⁵ 2.1×10⁶ 4.5×10³ lzz(Kgmm²) / 1.6×10⁶ 1.1×10⁷ 1.4×10⁶ 4.5×10⁴ 1.1×10⁴ ■ Joint coupling
Joint J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Coupling relationship equation
(Coupling coefficient)/ / / / / 81 ■ Reducer parameters
Model 100C 250BX 42D 32 Harmonic 20 Harmonic 20 Harmonic Reducer reduction ratio 36.75 111 105 50 80 80 Comprehensive reduction ratio 102.9 111 104 102 104.52 104.52 Rated output speed(r/min) 15 15 15 25 25 25 Rated torque(N·m) 980 1078 412 76 25 25 Permissible torque for starting
and stopping(N ·m)2450 2695 1029 216 56 56 Instantaneous maximum torque(N ·m) 4900 5390 2058 382 98 98 Moment rigidity(N ·m) 2450 2940 1660 / / / Instantaneous maximum torque(N ·m) 4900 5880 3320 / / / ■ Motor parameters
关Joint J1 J2 J3 J4 J5 J6 Motor model 130 180 130 60 60 60 Rated power(kW) 2 3 1.5 0.4 0.2 0.2 定格電圧(V) 220 定格電流(A) 10 18 7 2.6 1.4 1.4 定格トルク(N ·m) 6.36 14.3 4.77 1.27 0.63 0.63 定格速度(r/min) 3000 2000 3000 3000 3000 3000 最大速度(r/min) 3000 2200 3000 4500 4500 4500 ローター慣性(*10e-4kgm²) 16.5 51 9 0.4 0.216 0.216 ラインバック
起電力係数(V/Krpm)50.5 52.8 48 33 49.2 49.2 極対数 5 エンコーダ 17ビットマルチターン絶縁値玉川協定 関連製品
メッセージ
質問があれば、私達にメッセージを残すことができます。私たちはあなたに返信する専門家を持っています。正しい連絡先情報を入力してください!
寧波中大力徳知能伝動株式有限公司
住所:寧波慈溪高新技術産業開発区新興一路185号
本社電話:+86-4009-002896
北方サービスセンター電話:+86-022-58786102/04
華南サービスセンター電話:+86-769-23606081/82
-






