
中大、自働化の応用を無限なる可能性を実現する! 詳細 +
-
-
-
製品
詳細
ZDFH0614産業用ロボットZDFH0614は現代製造の最前線に立ち、比類のない精度と効率を提供します。この先進的なロボットは、最先端の技術を活用して、さまざまな産業アプリケーションでスムーズで信頼性の高い操作を確保します。最先端のデザインにより、パフォーマンスと耐久性が向上し、厳しい基準を求める産業に最適です。
自動車産業では、ZDFH0614は高速かつ高精度な動作を必要とするタスクで優れた性能を発揮します。その優れた制御アルゴリズムにより、さまざまな自動化システムとのシームレスな統合が可能で、正確な位置決めと速度調整を実現します。この精度は、組立ライン、材料搬送、溶接などのプロセスにおいて重要であり、わずかな偏差でも品質問題やダウンタイムにつながる可能性があります。
エネルギー効率はZDFH0614の重要な差別化要因です。エネルギー損失を最小限に抑えることで、このロボットは運用コストの削減と環境への影響の低減に貢献します。その効率的な電力管理は、接続されたモーターの寿命を延ばすだけでなく、熱生成を減少させ、全体的なシステムの信頼性を向上させます。これにより、持続可能性とコスト効果に焦点を当てた産業に特に価値があります。
多様性もZDFH0614の特徴です。複数の通信プロトコルをサポートするように設計されており、多様な産業ネットワークに簡単に統合できます。従来のフィールドバスや最新の産業用イーサネット標準に関係なく、このロボットはシームレスな通信と簡単なセットアップを保証します。この適応性により、ユーザーは大幅な変更なしにシステムをアップグレードできるため、将来にわたって安心して使用できるソリューションを提供します。
安全機能はZDFH0614の不可欠な要素であり、過電流保護、熱管理、および故障診断が組み込まれています。これらの安全メカニズムはロボットと接続された機器の両方を保護し、損傷を防ぎ、不利な条件下でも継続的な運用を確保します。この堅牢な安全フレームワークはオペレーターに安心感を提供し、産業プロセス全体の信頼性を向上させます。
ユーザーフレンドリーなインターフェースはZDFH0614の優先事項です。直感的なコントロールと明確なディスプレイが構成、監視、およびトラブルシューティングを簡素化します。この使いやすさはトレーニング要件を最小限に抑え、生産性を最大化し、オペレーターが複雑な設定ではなく重要なタスクに集中できるようにします。シンプルなインターフェースにより、新人ユーザーでも自信を持ってロボットを操作できます。
要約すると、ZDFH0614産業用ロボットは、その精度、効率、多様性、およびユーザー中心のデザインによって現代製造の領域で際立っています。これは現代産業の進化するニーズに応え、運用卓越性を高める信頼性が高く持続可能なソリューションを提供します。産業が革新を受け入れ続ける中で、ZDFH0614は進歩の礎となり、自動化の未来を推進しています。
ロボットモデル ZDFH0614 自由度 6 位置 地面設置および吊り下げ
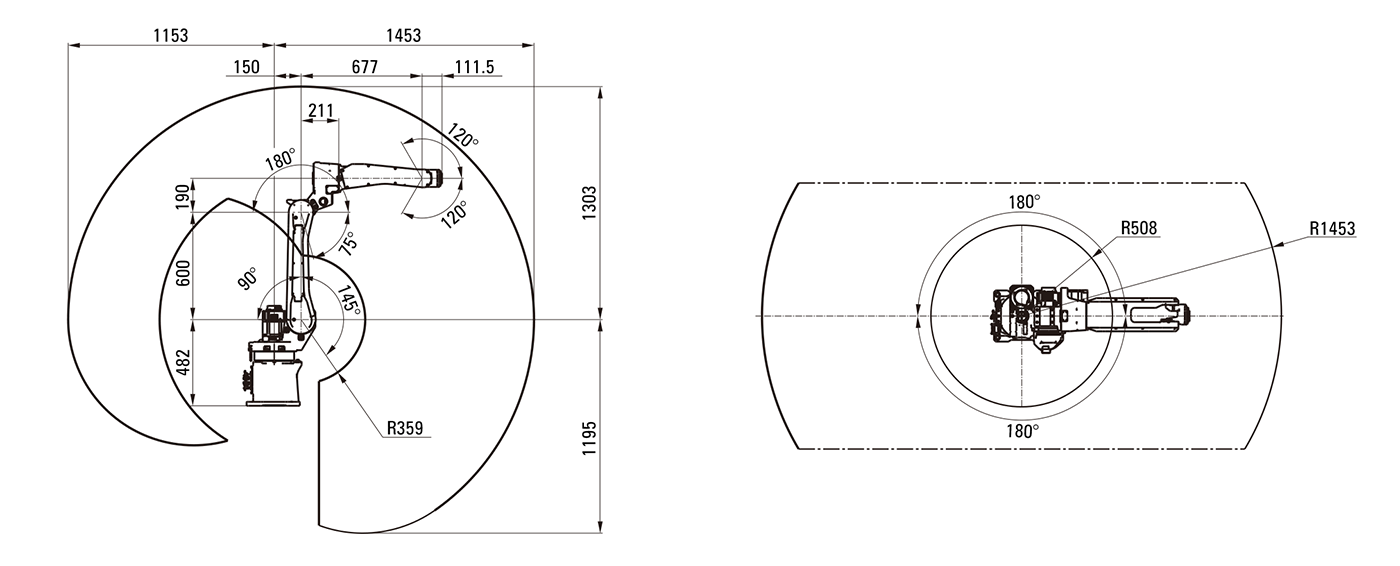
天井設置最大動作速度 J1軸 165°/秒 J2軸 155°/秒 J3軸 335°/秒 J4軸 290°/秒 J5軸 315°/秒 J6軸 925°/秒 最大動作範囲 J1軸 ±180° J2軸 -145°~+90° J3軸 -75°~+180° J4軸 ±170° J5軸 ±120° J6軸 ±360° 最大活動半径 1453mm 最大エンド負荷 6Kg 本体重量 約125Kg 許容トルク J4 10.5N·m J5 10.5N·m J6 5.9N·m 許容慣性モーメント J4 0.28kg·m² J5 0.28kg·m² J6 0.06kg·m² 繰り返し精度 +/-0.05mm ロボットベースサイズ (290×300mm) Ambient temperature 0~45℃ Relative humidity 20~80%RH Atmospheric pressure 89KPa~106KPa(海拔1000m以下)
Altitude below 1000mVibration,impact,collision ≤0.5G Protection grade IP54(Wrist IP65) ■ 作業範囲図
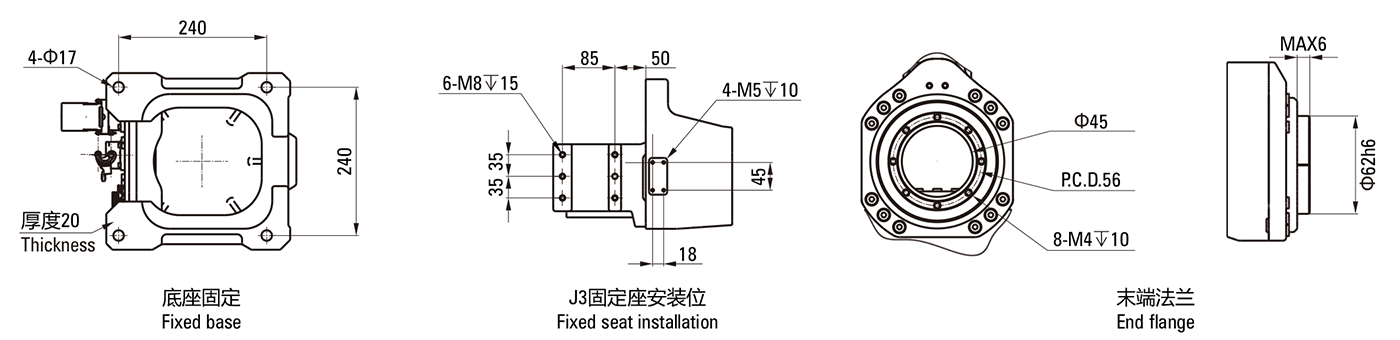
■ 設置インターフェース図
質量中心に対する接続棒の慣性テンソル
物体 ベース 回転座
部品ブーム部品 小アーム固定座
部品小アーム
部品手首 相談 座標系0 座標系1 座標系2 座標系3 座標系4 座標系5 lxx(Kgmm²) / 1.8×10⁶ 2.3×10⁶ 5.3×10⁵ 3.8×10⁴ 1.1×10⁴ lyy(Kgmm²) / 2.0×10⁶ 2.2×10⁶ 6.4×10⁵ 7.2×10⁵ 9.3×10³ lzz(Kgmm²) / 7.8×10⁵ 1.0×10⁵ 3.7×10⁵ 7.3×10⁵ 3.9×10³ ジョイントカップリング
ジョイント J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 カップリング関係式
(カップリング係数)/ / / / / 11.7 減速機パラメータ
モデル 50C 42D 25D 32次ハーモニック 20次ハーモニック ギアボックス 減速機減速比 32.54 105 81 50 50 / 総合減速比 97.62 104 80 102 102 35.1 定格出力回転数(r/min) 15 15 15 40 25 / 定格トルク(N ·m) 490 412 245 76 34 / 始動および停止のための許容トルク(N ·m)
and stopping(N ·m)1225 1029 612 216 74 / 瞬時最大トルク(N ·m) 2450 2058 1225 382 127 / モーメント剛性(N ·m) 1764 1660 784 / / / 瞬時最大トルク(N ·m) 3528 3320 1568 / / / モーターパラメータ
ジョイント J1 J2 J3 J4 J5 J6 モーターモデル 130 130 80 60 40 40 定格出力(kW) 1.5 1.5 0.75 0.4 0.1 0.1 定格電圧(V) 220 定格電流(A) 7 7 5 2.6 0.85 0.85 定格トルク(N ·m) 4.77 4.77 2.38 1.27 0.31 0.31 定格速度(r/min) 3000 3000 3000 3000 3000 3000 最大速度(r/min) 3200 3200 4100 5000 5000 5400 ローター慣性(*10e-4kgm²) 9 9 1.2 0.4 0.06 0.06 Line back
electromotive force coefficient (V/Kpm)48 48 36.2 33 25.2 25.2 Number of pole pairs 5 Encoder 17 bit multi turn insulation value Tamagawa agreement 関連製品
メッセージ
質問があれば、私達にメッセージを残すことができます。私たちはあなたに返信する専門家を持っています。正しい連絡先情報を入力してください!
寧波中大力徳知能伝動株式有限公司
住所:寧波慈溪高新技術産業開発区新興一路185号
本社電話:+86-4009-002896
北方サービスセンター電話:+86-022-58786102/04
華南サービスセンター電話:+86-769-23606081/82
-






